CAD Drawings
I used Autodesk Inventor to draw my robot. These are the parts i used.
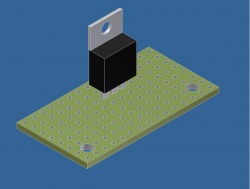
Base
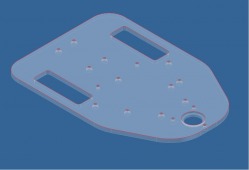
I wrote a program for the CNC mill and used perspex.
Picaxe
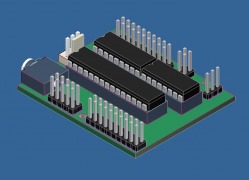
I used a Picaxe 28x1.
Sensor
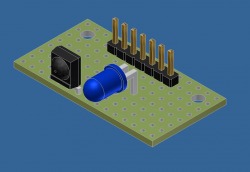
I used modulated infrared for its cost effectiveness and relative reliability.
DC Motor
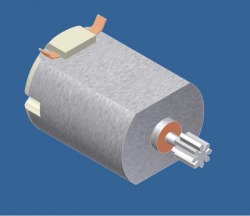
I used the standard Mabuchi 3V DC motors that came with the gearbox.
Title.
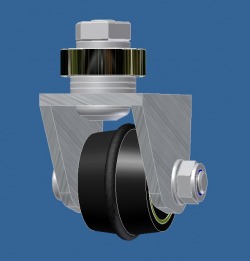
My castor wheel consists of an aluminium bracket with an acetal wheel. Rotation of the wheel is proveded by two sealed bearings, press fit in either side and rotation of the castor is provided by one sealed bearing mounted on the base.
Gearbox
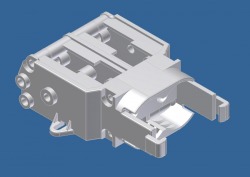
I used a Tamiya twin-motor gearbox with a 114.7:1 ratio.
Regulator
For the Picaxe, i used a 9v supply, regulated to 5v.
Battery Pack

For the motors, i used 4 AA batteries.
Wheel

I used the narrow wheels for good grip and manuverability.
